Mechanical · UNIT-M2
Braking
We build a three-mode braking system - electromagnetic for high speed, pneumatic for low speed, and friction for emergencies - so the pod can stop safely every run.
High-Speed
Electromagnetic
Low-Speed
Pneumatic
Emergency
Friction / Dead-Man
Long-Term
Regenerative
Braking
Zero Contact.
Zero Contact.
Zero Compromise.
The Braking subteam designs, tests, and integrates the pod's pneumatic and electromagnetic brakes. Electromagnetic braking scales with speed for high-speed stopping, while pneumatic brakes deliver steady force as the pod slows.
A dead-man friction brake protects against power loss, and we are pushing toward regenerative braking and easier manufacturing. New members get hands-on with modeling, test rigs, and system integration.
Core Responsibilities
check_circle
Pneumatic System Automation
Automating the pneumatic braking system for reliable low-speed stopping.
check_circle
Electromagnetic Brakes
Developing electromagnetic braking with concepts for magnetic field redirection.
check_circle
Fail-Safe Friction Brakes
Emergency braking that actuates during power loss via a dead-man's switch.
check_circle
Mass & Manufacturing Optimization
Refining designs for lower mass and easier manufacturing.
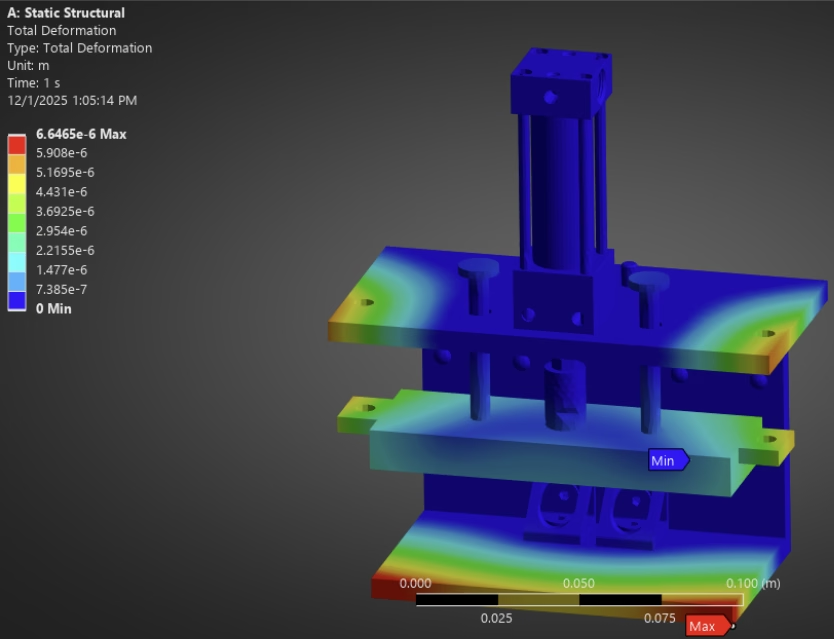
IMG-M2-01
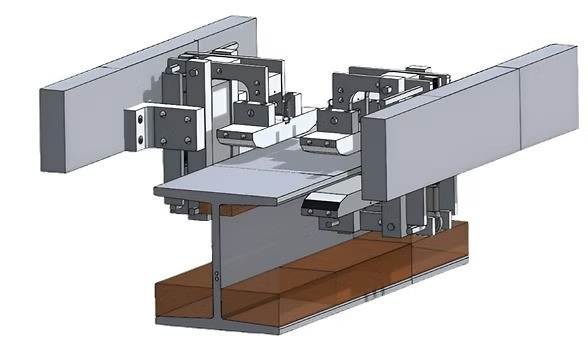
IMG-M2-02

Current Projects
Pneumatic Automation
Electromagnetic Brakes
Field Redirection
Mass Optimization
Manufacturing Ease
Join the Team